|
NTRT Simulator
v1.1
|
|
NTRT Simulator
v1.1
|
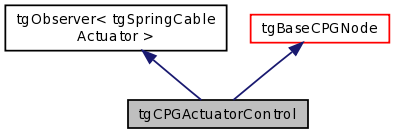
Inherits tgObserver< tgSpringCableActuator >, and tgBaseCPGNode.
Inherited by tgCPGCableControl, and tgCPGStringControl_mod.
Public Member Functions | |
| tgCPGActuatorControl (const double controlStep=1.0/10000.0) | |
| virtual void | onAttach (tgSpringCableActuator &subject) |
| virtual void | onStep (tgSpringCableActuator &subject, double dt) |
| void | assignNodeNumber (CPGEquations &CPGSys, array_2D nodeParams) |
| void | setConnectivity (const std::vector< tgCPGActuatorControl * > &allStrings, array_4D edgeParams) |
| const int | getNodeNumber () const |
| const CPGEquations * | getCPGSys () const |
| const double | getCommandedTension () const |
| virtual void | setupControl (tgImpedanceController &ipc) |
| void | setupControl (tgImpedanceController &ipc, double controlLength) |
| const btRigidBody * | getFromBody () const |
| const btRigidBody * | getToBody () const |
| virtual void | onSetup (tgSpringCableActuator &subject) |
| virtual void | onTeardown (tgSpringCableActuator &subject) |
| virtual double | getCPGValue () const |
Protected Member Functions | |
| tgImpedanceController & | motorControl () const |
| double | controlLength () const |
Protected Attributes | |
| double | m_controlTime |
| const double | m_controlStep |
| double | m_totalTime |
| double | m_commandedTension |
| btRigidBody * | m_pFromBody |
| btRigidBody * | m_pToBody |
| CPGEquations * | m_pCPGSystem |
| int | m_nodeNumber |
| double | m_controlLength |
Definition at line 44 of file tgCPGActuatorControl.h.
| void tgCPGActuatorControl::assignNodeNumber | ( | CPGEquations & | CPGSys, |
| array_2D | nodeParams | ||
| ) |
Can call these any time, but they'll only have the intended effect after all of the strings have been constructed.
Definition at line 102 of file tgCPGActuatorControl.cpp.
|
inline |
Pointer to the CPG system. Owned by the higher level controller
Definition at line 79 of file tgCPGActuatorControl.h.

|
virtual |
Notify the observers when an attach action has occurred. Will only occur once, typically before setup
| [in,out] | subject | the subject being observed |
Reimplemented from tgObserver< tgSpringCableActuator >.
Definition at line 64 of file tgCPGActuatorControl.cpp.
|
inlinevirtualinherited |
Notify the observers when a setup action has occurred.
| [in,out] | subject | the subject being observed |
Reimplemented in tgCPGCableControl.
Definition at line 61 of file tgObserver.h.
|
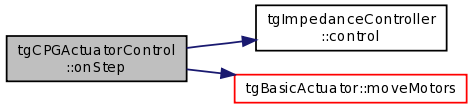
virtual |
Notify the observers when a step action has occurred.
| [in,out] | subject | the subject being observed |
| [in] | the | number of seconds since the previous call; must be positive |
Implements tgObserver< tgSpringCableActuator >.
Reimplemented in tgCPGCableControl, and tgCPGStringControl_mod.
Definition at line 79 of file tgCPGActuatorControl.cpp.
|
inlinevirtualinherited |
Notify the observers when a teardown action has occurred.
| [in,out] | subject | the subject being observed |
Definition at line 67 of file tgObserver.h.
| void tgCPGActuatorControl::setConnectivity | ( | const std::vector< tgCPGActuatorControl * > & | allStrings, |
| array_4D | edgeParams | ||
| ) |
Iterate through all other tgSpringCableActuatorCPGInfos, and determine CPG network by rigid body connectivity
Definition at line 122 of file tgCPGActuatorControl.cpp.

|
protected |
How often this controller updates. Must be non-negative. Zero means it updates every timestep. Units are seconds
Definition at line 114 of file tgCPGActuatorControl.h.
|
protected |
Member variable for keeping track of how long its been since the last update step
Definition at line 109 of file tgCPGActuatorControl.h.
 1.8.7
1.8.7 
